
JS-1型液压机械手外观示意图
- 作者:液压网
- 时间:2012-07-31
- 阅读:672

机械手能进行工件的传递、转位和装卸。能操作工具完成加工、装配、测量、切割、喷涂及焊接等作业,能在高温、高压、多粉尘,危险、易燃、易爆和放射性等恶劣环境中代替人手
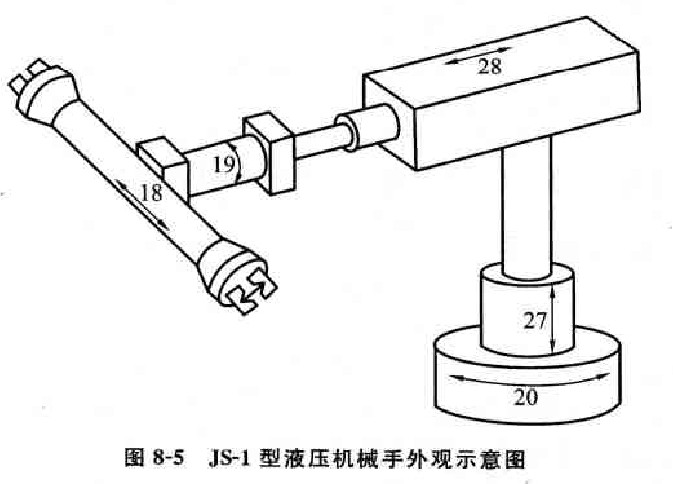
机械手能进行工件的传递、转位和装卸。能操作工具完成加工、装配、测量、切割、喷涂及焊接等作业,能在高温、高压、多粉尘,危险、易燃、易爆和放射性等恶劣环境中代替人手作业口图8-5所示为JS-1型液压机械手外观示意图。手臂回转由安装于底部的齿条液压缸(无杆活塞式液压缸)20驱动,手臂升降用液压缸27驱动,手臂伸缩通过液压缸28实现.手腕回转用齿条液压缸19带动、乎指松夹工件通过液压缸18实现。